![]()
The following is a list of the packages used with the RM3 small-scale ROBOMINERS prototype.
Requirements:
| Ubuntu 22.04 LTS (Jammy Jellyfish) | ROS 2 Humble Hawksbill |
|---|
- robominer_bringup
- robominer_drivers
- robominer_msgs
- robominer_locomotion_control
- robominer_state_estimation
This is a high-level Python package that contains only launch files. Lower level launch files also exist in other packages.
Contains drivers and other software for interfacing devices, such as motor modules, sensors, etc. This is a mixed C++ and Python package. Currently included interfaces to:
- motor modules (low level motor control software is here),
- BNO080 IMU,
- MCP9808 temperature sensor,
- Whisker sensor array,
- Pacific Inertial Wheel Motion Sensor (not used),
- Pacific Inertial PI-48 IMU (not used)
-
whiskers_launch.py launches the node under the name 'whiskers_publisher' to interface a total of 64 sensors. Set parameters:
- debug_mode:
Trueenables debugging messages on the console - console_print:
Trueenables printing of data from the sensors. The format of the printout can be chosen when constructing the SensorGrid object.
- debug_mode:
-
When running the node using
ros2 run robominer_drivers tlv493d_tca9548a_whiskers, both parameters are initialized astrue.
The nodes that interface the arduinos in the motor modules identify them by their FTDI's serial number. The launch file creates parameters containing this information for each node. The current configuration is:
| Position | Serial Number |
|---|---|
| Front Right | AB0LB3F2 |
| Rear Right | AB0LB3F4 |
| Rear Left | AB0LB3F3 |
| Front Left | AQ00PUPC |
C++ package that contains all custom interfaces (messages and actions) of the repository. Needs to be built first for other packages to be able to find the interfaces.
# navigate to dev_ws/ and build custom messages
colcon build --packages-select robominer_msgs
Python package that contains state estimation for RM3, including forward and inverse kinematics and dynamics, data fusion tools, etc.
Python package that contains control software for the RM3 locomotion, including trajectory tracking, path-finding (a-star, theta-star), closed-loop pose control, etc.
The following publications contain work from this repository:
| Title | accompanying video |
|---|---|
| Gkliva, R., Remmas, W., Godon, S., Rebane, J., Ochs, K., Kruusmaa, M., & Ristolainen, A. (2024). A Multi-Terrain Robot Prototype with Archimedean Screw Actuators: Design, Realisation, Modelling, and Control. IEEE Access. |  |
| Kossas, T., Remmas, W., Gkliva, R., Ristolainen, A., & Kruusmaa, M. (2024, May). Whisker-based tactile navigation algorithm for underground robots. In 2024 IEEE International Conference on Robotics and Automation (ICRA) (pp. 13164-13170). IEEE. | 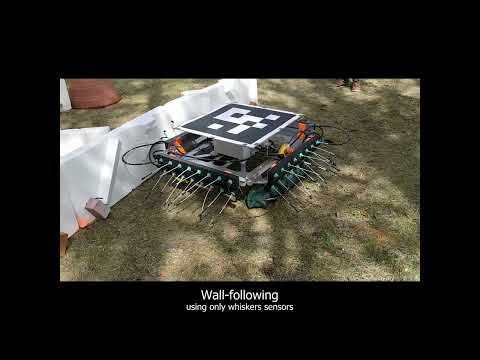 |
Find more information in our webpage